We present a whole-body loco-manipulation controller combining model-based admittance control for the manipulator with a reinforcement-learning locomotion policy for the legs. Experiments on a Unitree Go2 quadruped with a 6-DoF arm demonstrate compliant interaction, accurate force tracking, and safe operation during dynamic human-robot interaction.
@inproceedings{schperberg2026loco_manipulation,title={Safe Whole-Body Loco-Manipulation via Combined Model and Learning-based Control},author={Schperberg, Alexander and Wang, Yeping and Di Cairano, Stefano},booktitle={IEEE International Conference on Robotics and Automation (ICRA)},year={2026},}
RA-L
GRAM: Generalization in Deep RL With a Robust Adaptation Module
James Queeney, Xiaoyi Cai, Alexander Schperberg, and 3 more authors
We propose GRAM, a deep reinforcement learning framework that unifies adaptive and robust generalization across in-distribution and out-of-distribution dynamics via a robust adaptation module. Experiments on a quadruped robot demonstrate strong performance and reliable deployment across diverse environments.
@article{queeney2026gram,author={Queeney, James and Cai, Xiaoyi and Schperberg, Alexander and Corcodel, Radu and Benosman, Mouhacine and How, Jonathan P.},title={GRAM: Generalization in Deep RL With a Robust Adaptation Module},journal={IEEE Robotics and Automation Letters (RA-L)},year={2026},volume={11},number={2},pages={2218--2225},doi={10.1109/LRA.2025.3641155},}
2025
IROS
Energy-Efficient Motion Planner for Legged Robots
Alexander Schperberg, Marcel Menner, and Stefano Di Cairano
In 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025
We present an energy-efficient motion planner for legged robots that improves trajectory generation while accounting for robustness and hardware-relevant constraints. Results demonstrate effective and practical planning performance for legged locomotion.
@inproceedings{schperberg2025energy_efficient_motion,author={Schperberg, Alexander and Menner, Marcel and Di Cairano, Stefano},title={Energy-Efficient Motion Planner for Legged Robots},booktitle={2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},year={2025},pages={18888--18895},doi={10.1109/IROS60139.2025.11246509},}
IROS
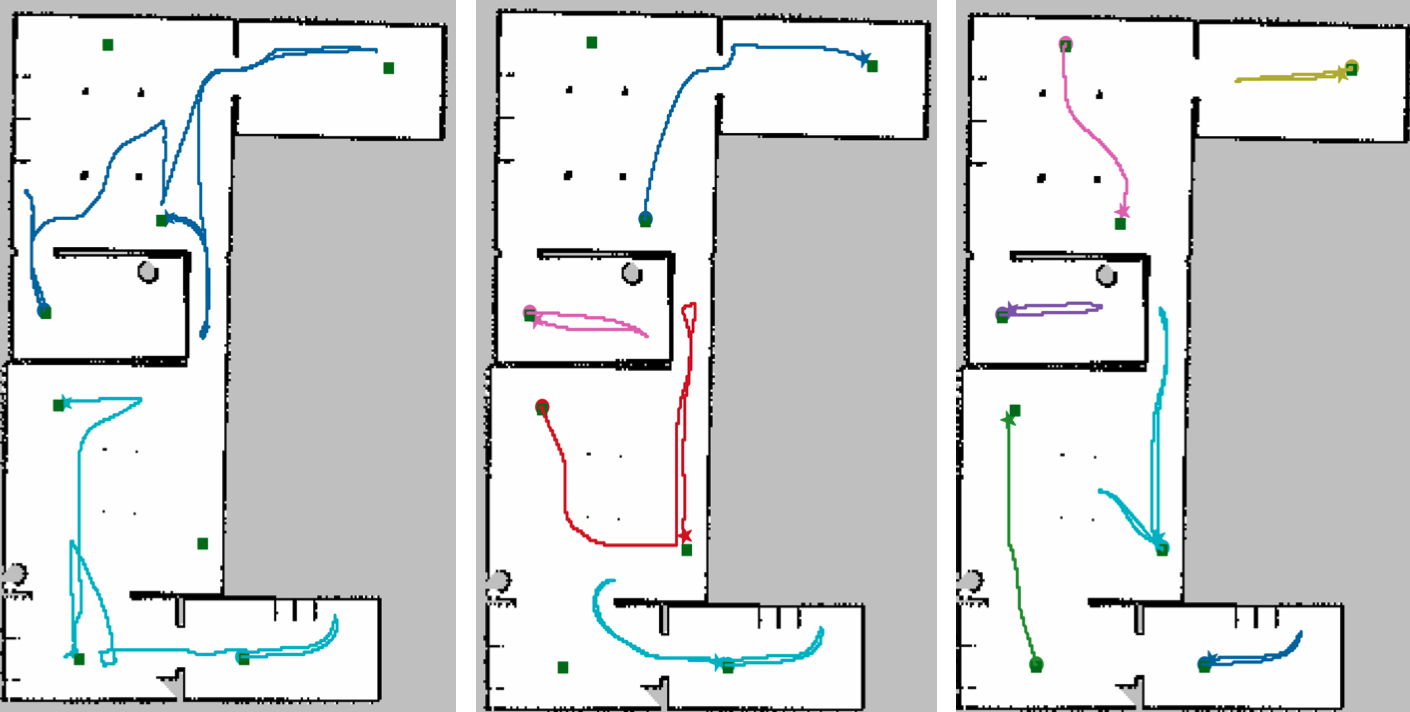
Energy-constrained multi-robot exploration for autonomous map building
Sambhu Karumanchi, Bhagawan Rokaha, Alexander Schperberg, and 1 more author
In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Oct 2025
We consider the problem of building the map of an unknown environment using multiple mobile robots with limited onboard energy. The proposed method combines frontier-based exploration, graph-based planning, and multi-robot task assignment to ensure energy-feasible trajectories with guarantees on recursive feasibility and finite-time termination.
@inproceedings{karumanchi2025energy_constrained_exploration,author={Karumanchi, Sambhu and Rokaha, Bhagawan and Schperberg, Alexander and Vinod, Abraham P.},title={Energy-constrained multi-robot exploration for autonomous map building},booktitle={IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},year={2025},pages={9154--9161},month=oct,doi={10.1109/IROS60139.2025.11247332},}
TRO
SCALER: Versatile Multilimbed Robot for Free-Climbing in Extreme Terrains
Yusuke Tanaka, Yuki Shirai, Alexander Schperberg, and 2 more authors
SCALER is a versatile multilimbed robot capable of free-climbing in extreme terrains. The platform integrates legged locomotion with grasping capabilities, enabling robust traversal and manipulation in complex environments.
@article{tanaka2025scaler,author={Tanaka, Yusuke and Shirai, Yuki and Schperberg, Alexander and Lin, Xuan and Hong, Dennis},title={SCALER: Versatile Multilimbed Robot for Free-Climbing in Extreme Terrains},journal={IEEE Transactions on Robotics},year={2025},volume={41},pages={5189--5208},doi={10.1109/TRO.2025.3588446},}
2024
ICRA
OptiState: State Estimation of Legged Robots using Gated Networks with Transformer-based Vision and Kalman Filtering
Alexander Schperberg, Yusuke Tanaka, Saviz Mowlavi, and 3 more authors
In 2024 IEEE International Conference on Robotics and Automation (ICRA), 2024
State estimation for legged robots is challenging due to their highly dynamic motion and limitations imposed by sensor accuracy. By integrating Kalman filtering, optimization, and learning-based modalities, we propose a hybrid solution that combines proprioception and exteroceptive information for estimating the state of the robot’s trunk. Leveraging joint encoder and IMU measurements, our Kalman filter is enhanced through a single-rigid body model that incorporates ground reaction force control outputs from convex Model Predictive Control optimization. The estimation is further refined through Gated Recurrent Units, which also considers semantic insights and robot height from a Vision Transformer autoencoder applied on depth images. This framework not only furnishes accurate robot state estimates, including uncertainty evaluations, but can minimize the nonlinear errors that arise from sensor measurements and model simplifications through learning. The proposed methodology is evaluated in hardware using a quadruped robot on various terrains, yielding a 65% improvement on the Root Mean Squared Error compared to our VIO SLAM baseline.
@inproceedings{schperberg2024optistate,title={OptiState: State Estimation of Legged Robots using Gated Networks with Transformer-based Vision and Kalman Filtering},author={Schperberg, Alexander and Tanaka, Yusuke and Mowlavi, Saviz and Xu, Feng and Balaji, Bharathan and Hong, Dennis},booktitle={2024 IEEE International Conference on Robotics and Automation (ICRA)},year={2024},}
2023
Humanoids
Adaptive Force Controller for Contact-Rich Robotic Systems using an Unscented Kalman Filter
Alexander Schperberg, Yuki Shirai, Xuan Lin, and 2 more authors
In 2023 IEEE-RAS 22nd International Conference on Humanoid Robots (Humanoids), 2023
We present an adaptive admittance controller for multi-point contact robotic systems that tracks desired wrench profiles using an Unscented Kalman Filter. The controller auto-tunes gains online to improve stability, avoid slipping, and handle contact uncertainty, and is validated on hardware for manipulation, locomotion, and climbing tasks.
@inproceedings{schperberg2023adaptive_force_controller,title={Adaptive Force Controller for Contact-Rich Robotic Systems using an Unscented Kalman Filter},author={Schperberg, Alexander and Shirai, Yuki and Lin, Xuan and Tanaka, Yusuke and Hong, Dennis},booktitle={2023 IEEE-RAS 22nd International Conference on Humanoid Robots (Humanoids)},year={2023},pages={1--8},doi={10.1109/Humanoids57100.2023.10375157},}
2022
IROS
Simultaneous Contact-Rich Grasping and Locomotion via Distributed Optimization Enabling Free-Climbing for Multi-Limbed Robots
Yuki Shirai, Xuan Lin, Alexander Schperberg, and 4 more authors
In 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2022
We present an efficient motion planning framework that simultaneously solves locomotion, grasping, and contact problems for multi-limbed robots. The method uses distributed optimization based on ADMM to accelerate planning and explicitly enforces patch contact constraints for micro-spine grippers, enabling free-climbing on a real robot.
@inproceedings{shirai2022simultaneous_contact_rich_grasping,title={Simultaneous Contact-Rich Grasping and Locomotion via Distributed Optimization Enabling Free-Climbing for Multi-Limbed Robots},author={Shirai, Yuki and Lin, Xuan and Schperberg, Alexander and Tanaka, Yusuke and Kato, Hayato and Vichathorn, Varit and Hong, Dennis},booktitle={2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},year={2022},}